


トレーニングシーンに合わせたシューズをご提案。
自主トレやランニングなどシーンに合わせて履き分けることで
足への負担を軽減、パフォーマンスの向上に繋げよう!




グラウンドでのトレーニングに
グラウンドでのトレーニングに
おすすめしたいアイテムが「イノヴェイト(inov-8)」。
抜群のグリップ力を持ち、雨や朝露などの環境下でも
滑りにくくトレーニングに最適です。

イノヴェイト(inov-8)とは
inov-8の歩みはたった1つのビジョン、ナチュラルで軽量、それでいて抜群のグリップ力で最も過酷なオフロード環境を走破できるシューズを造ることから始まった。
未舗装の山道を走るトレイルランニングに対応したグリップ力と軽量性を誇るシューズは、オフロードシューズにおけるリーダーとして世界20ヶ国で販売されています。
また、オフロードのコンセプトをトレッキング、ランニング、ジム・フィットネスなど様々なシーンに応用したシューズ展開を広げているブランドです。

トレイルランニングシューズ
あらゆる地形に対応できるグリップ性
inov-8のオリジンであるイギリスの丘陵地帯から南極やサハラ砂漠まで、世界中のあらゆる地形を走ってきた中で我々は一つの真実に辿り着いた。
それは「真のプロダクトはアスリートとそれを取り巻く環境の接点を追求することで生まれる」ということ。アスリートと地形の接点にこそinov-8 が存在する意義があり、グリップ性の追求に終わりはない。
社会人軟式野球チーム
「東京ヴェルディ・バンバータ」の選手が愛用!
2008年設立のアマチュア野球クラブ。「3年で日本一を獲らなかったら解散!」との大きな夢を掲げた普通の草野球チームとして発足。
3年目の2011年に全日本軟式野球連盟に登録、その年に初めて出場した「高松宮賜杯第55回全日本軟式野球大会2部」で初優勝。公約通り3年で日本一のタイトルを獲得。
その後も「第8回マルハンドリームカップ全国ベースボールトーナメント(2014年)」、「第14回 全国軟式野球統一王座決定戦ジャパンカップ(2014年)」、「MLBドリームカップ2017」と4度の全国大会優勝を達成。
現在は総合クラブの東京ヴェルディの野球チームとなり、U-15硬式・軟式、ジュニアチームも展開する。
東京ヴェルディ・バンバータ|公式ウェブサイト
www.tokyo-bambaataa.com

選手たちの声
これまで、ランニングシューズを履いてトレーニングをしていたのですが、土や芝での練習が多いため、踏ん張りが効かず、アッパーが破れることもありました。
inov-8はスタッドがしっかり付いていながら走りやすいので、グリップが効いてとても動きやすくなりました。
耐久性も強く、野球のいろんなトレーニングで使えます。
グランドでのシューズはトレイルランニングシューズの方が理にかなっていると思います。



不整地を駆け抜けるために設計された商品群。
共通した特徴と言える「地面を掴み取る感覚」は
inov-8のDNAそのものであり、
ランナーのコントロールを高める。

イノヴェイト
X-TALON 255 MS NO2PGG05BG 【トレイルランニングシューズ トレラン】
¥13,200円(税込)

イノヴェイト
X-TALON G 210 MS NO2PGG03BB 【トレイルランニングシューズ トレラン】
¥14,025円(税込)

イノヴェイト
X-TALON G 235 MS NO2PGG04OB 【トレイルランニングシューズ トレラン】
¥15,675(税込)

イノヴェイト
X-TALON ULTRA 260 MS NO2NIG01BB 【トレイルランニングシューズ トレラン】
¥12,787円(税込)

イノヴェイト
X-TALON ULTRA 260 MS NO2QGG02YB 【トレイルランニングシューズ トレラン】
¥12,787円(税込)



クッション性とプロテクション、
グリップ力を高次元で備えたロングトレイルに好適なモデル。
アウトソールにTRI-Cシステムを採用し、
路面との接地を考えてラバー配合を3種類に分割・配置。
RACE ULTRAソールに比べ
グリップ性とクッション性が向上。

イノヴェイト
TRAIL TALON 235 V2 MS NO2PGG09GR 【トレイルランニングシューズ トレラン】
¥12,787円(税込)
アスファルトでのランニングに
アスファルトでの練習が多い部活生に
おすすめしたいシューズがデサント「GENTEN」。
ランナー本来の走りを引き出すをコンセプトにデザインされた
〝自分の足を使って走る〟という感覚が持てるシューズです。

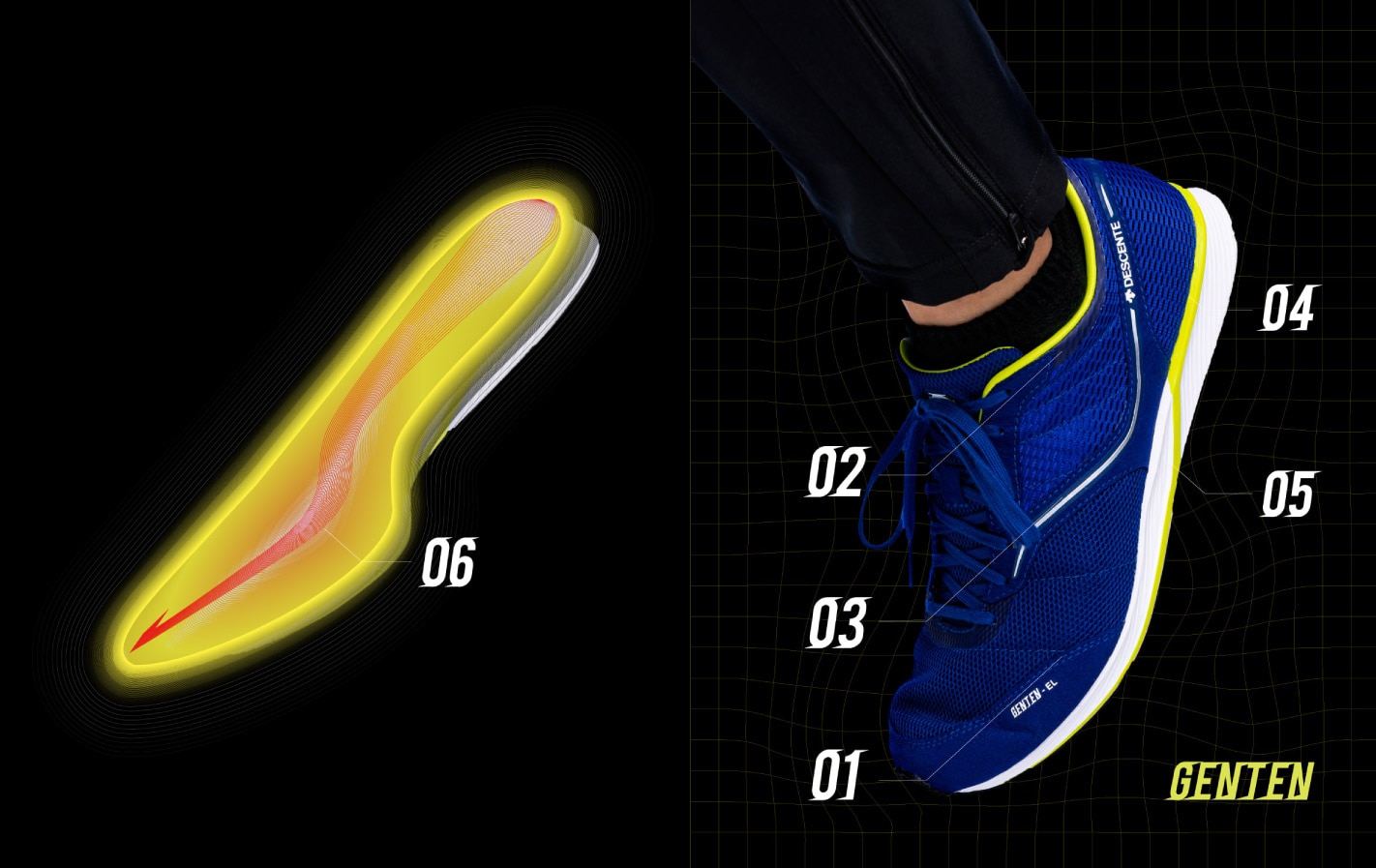
| フィット感
原点に立ち返った「走る為のシューズ」を開発。
脚力のロス無い高いホールド性で今までに無いフィット感を実現。
| ミニマルデザイン
ランニングシューズに必要な機能性(ホールド性・軽量化)を最小限のデザイン・意匠性にすることで実現。
| 「輝流」ライン
「炎のような情熱と氷のような冷静な判断力」という、あらゆるスポーツで栄光を勝ち取る為に必要な要素(原点)を表現したデザインから生まれた「輝流」をデザインコンセプトとしたサポートライン。
| グラフェン搭載
ノーベル物理学賞を受賞した「グラフェン」を配合したGRAPHENE RUBBER(※)を採用。地面をしっかり掴み、次の蹴り出しがしやすくなる形状、配置を研究開発。
※2004年にマンチェスター大学が世界で初めてグラファイトから分離することに成功した地球上で最も薄い素材でありながら鉄の200倍の強度を持つ最強の素材「グラフェン」。世界的にグラフェン開発において先端性を誇るマンチェスター大学と、当社関連会社であるinov8社の長年に亘る取り組みにより開発されたグラフェン応用技術を活用したアウトソールラバー。
| 反発性/カーボンプレート
地面により近い位置に配置することで、地面からの反発がそのままカーボンプレートに伝わることにより、高い反発力を発揮する。
| ドロップ形状
中足部で一気に角度を付けることで、走行時に推進力を得られやすい底面形状を開発。静止時の安定と走行時の推進力の両方を実現。

デサント
ランニングシューズ GENTEN-ST
¥13,200円(税込)

デサント
ランニングシューズ GENTEN-EL DR1QJF00RD
¥17,600円(税込)

デサント
ランニングシューズ GENTEN-RC DR1QJF01RD
¥15,400円(税込)

デサント
ランニングシューズ GENTEN-ST DR1PJF02NV
¥9,490円(税込)

デサント
ランニングシューズ GENTEN-ST DR1PJF02OR
¥9,999円(税込)

デサント
ランニングシューズ GENTEN-RC DR1PJF01BK
¥15,400円(税込)

デサント
ランニングシューズ GENTEN-EL DR1PJF00NV
¥17,600円(税込)

デサント
ランニングシューズ GENTEN-RC DR1PJF01NV
¥15,400円(税込)
こちらの自主トレアイテムもおすすめ!

ジャイロスティック
理想的なピッチング&スローイングを体得するためのギア

デサント
ジャイロスティック C-1000B BLK
¥1,670円(税込)